Large Format Printer
This is open source but I haven't gotten around to properly compiling the build information. For a CAD file of the complete assembly, configuration files, code, complete bill of materials, and as-is build instructions and electrical schematics, see here.
Youtube video: https://youtu.be/fzByhJ9Smns.
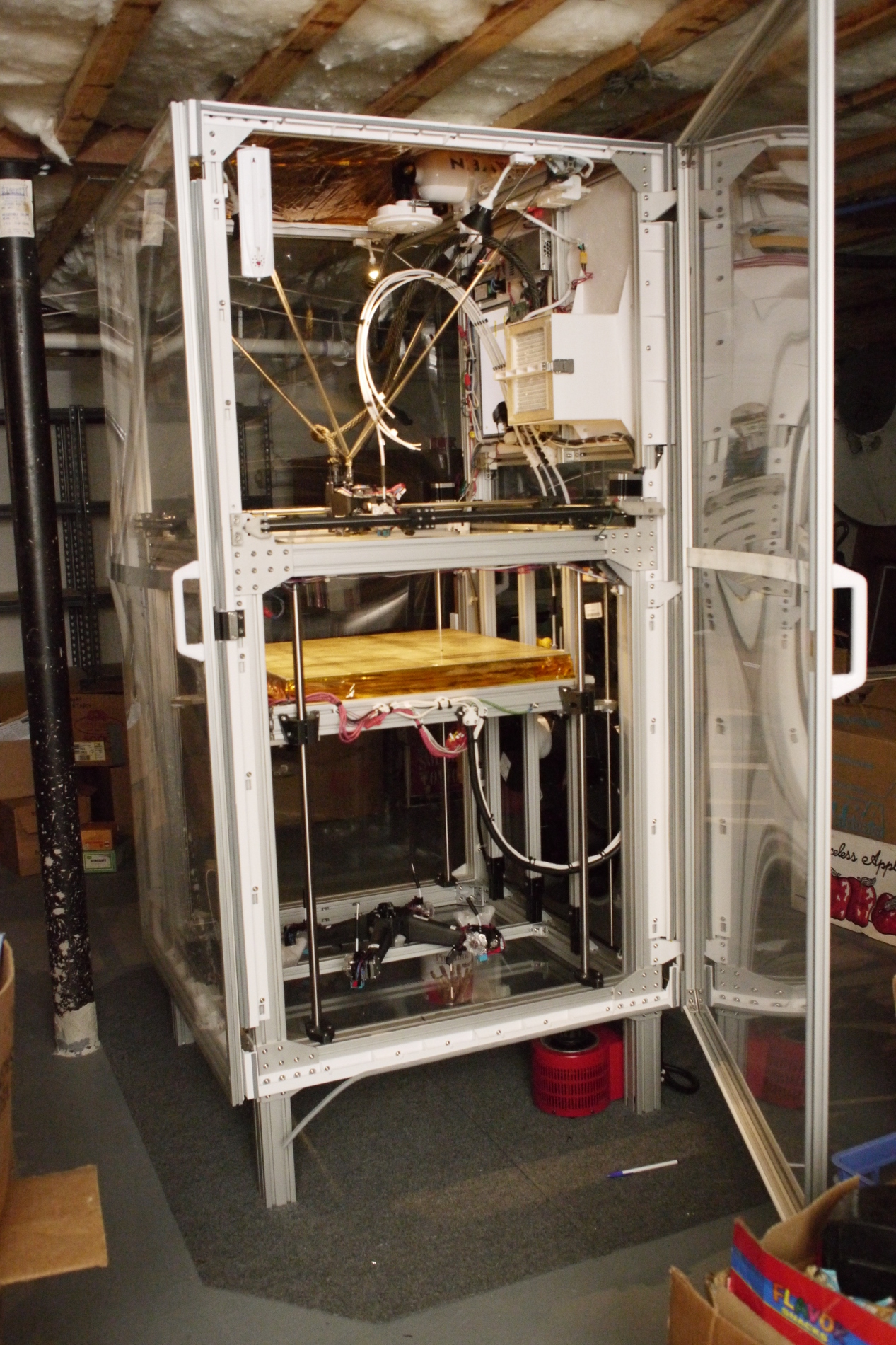
Made it as tall as possible while still fitting inside the basement; Fully enclosed with lightweight shrink-wrap style doors on all sides; 80/20 Aluminum Frame; HEPA filtered exhaust; Quad and mono toolheads with a quick-change kinematic mount; Takes 1.75mm filament; 5 spool holders can each take 3kg spools;Touchscreen control; 5-zone heated build plate (4 12" silicone heater squares plus perimeter nichrome heater wire); Smoke/shutdown system with automatic fire extinguisher backup. There's a smoke sensor on each extruder of each toolhead, plus another two positioned around the machine's fixed electronics. A detection on any one turns off a master relay, and the logic picks off power before the relay.

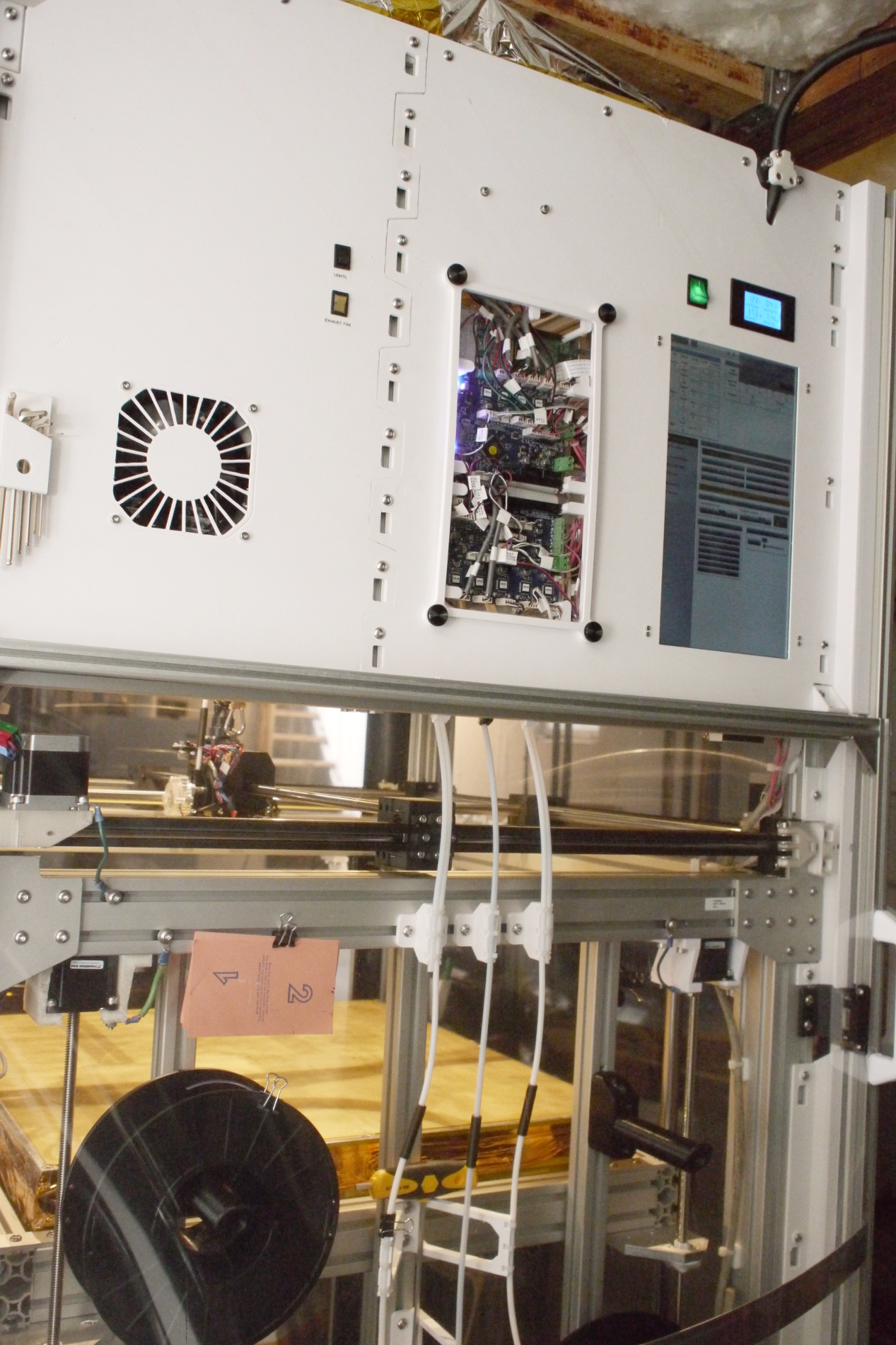
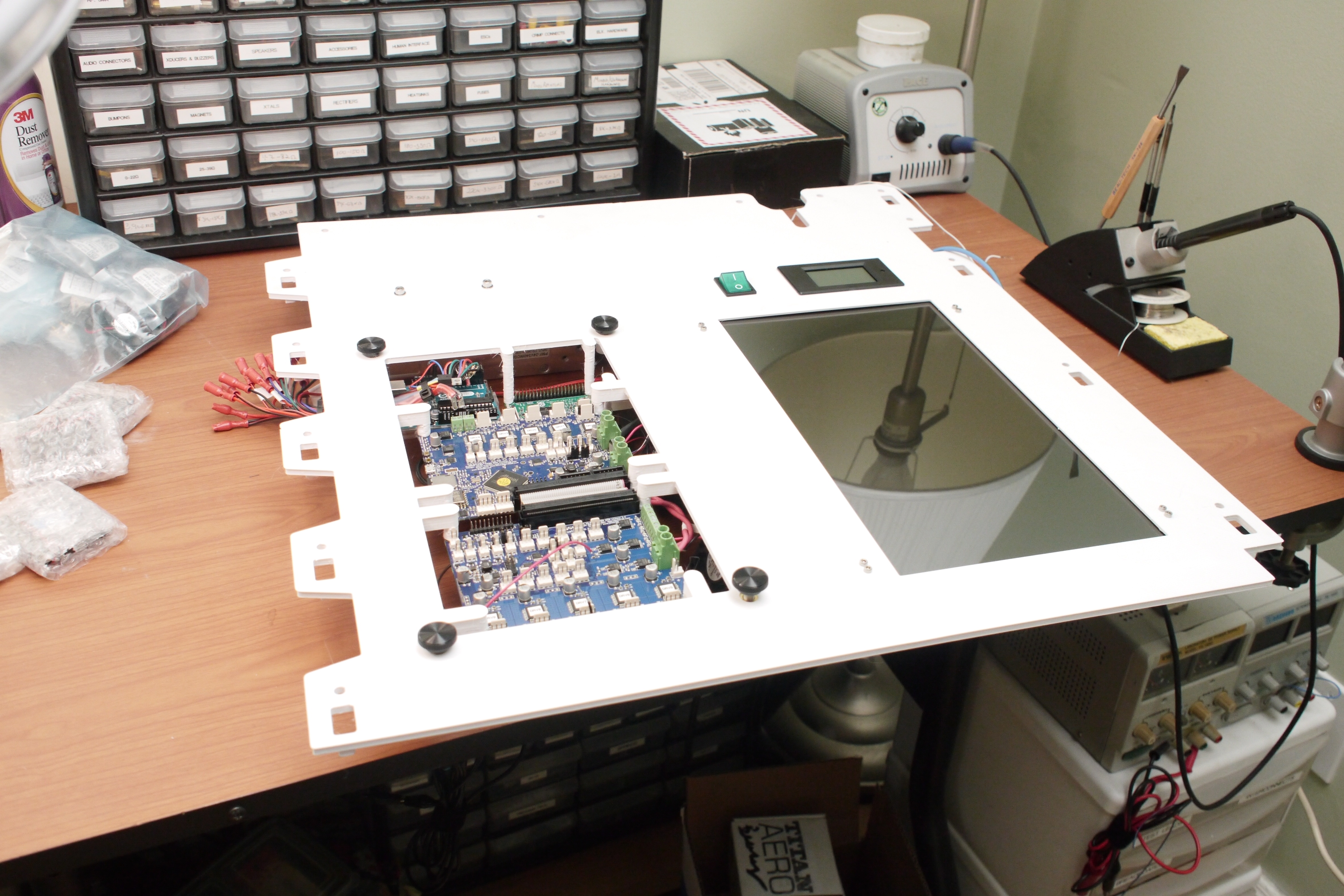
The control panel is self-printed in two pieces. Note the easy access to the Duet control boards. Vertical touchscreen is a third-party device connected to a Raspberry Pi, displaying the web interface from the control board in kiosk mode. Power switch and energy consumption monitor are above the screen. On the left note the switches for the HEPA exhaust and lights.
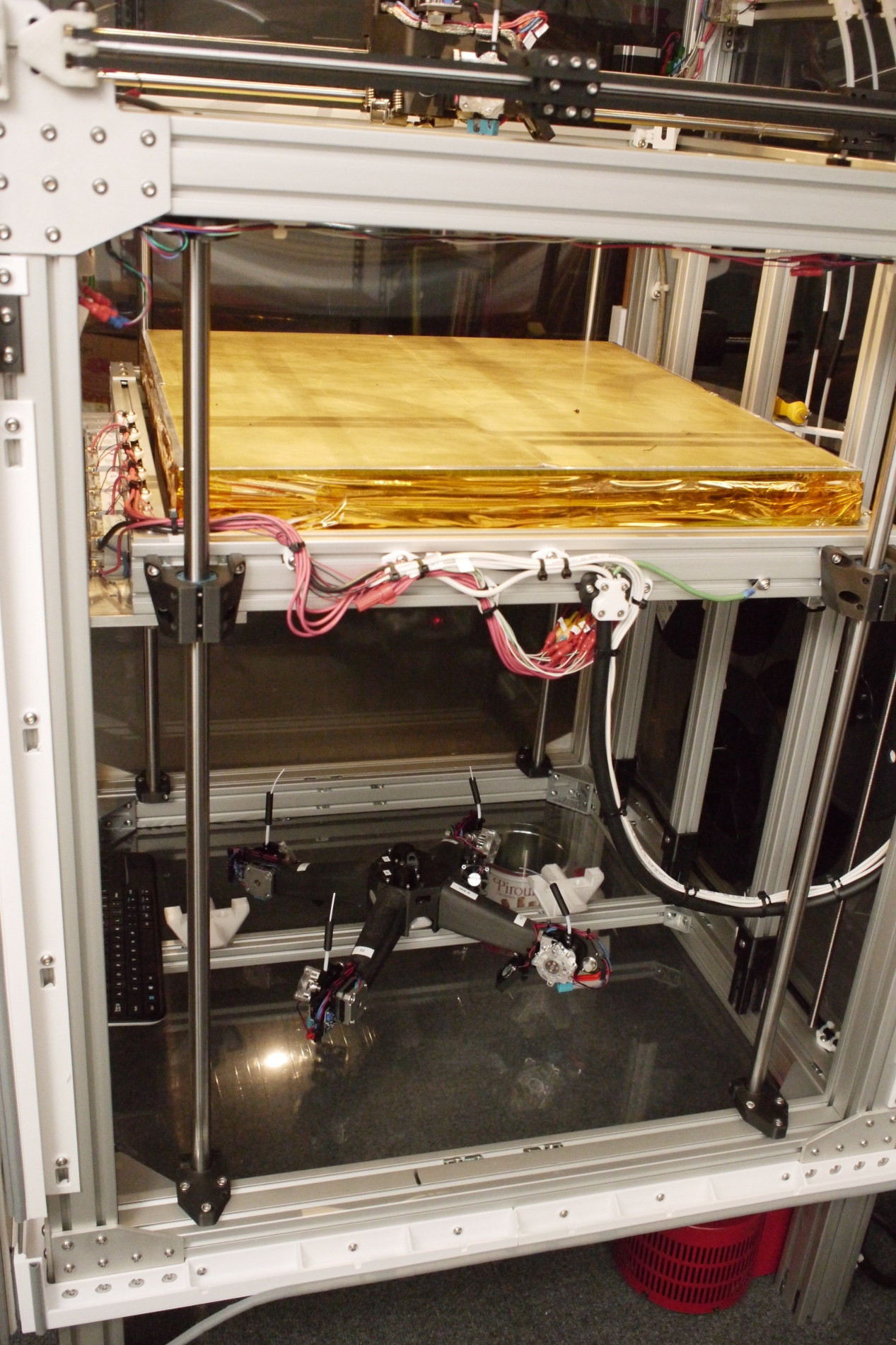
The 5-zone heated build plate is surfaced with PEI and wrapped with gold mylar for efficiency. Power feed is AC, stepped down from 120v to about 40v with a Variac. Solid-state relays are visible along the left edge. Underneath are toolhead holders with the quad toolhead in storage.
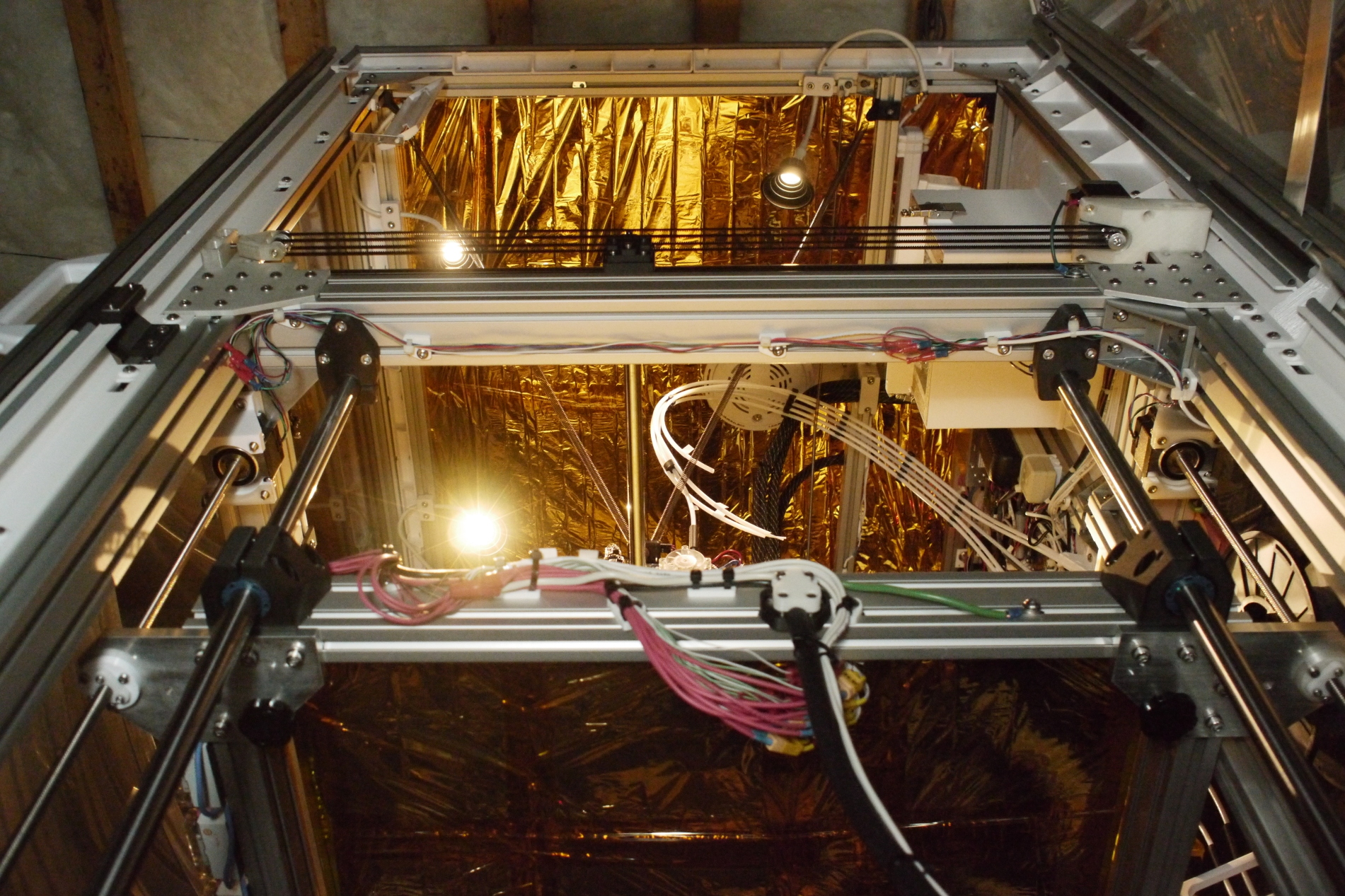
This bottom-up view shows insulating mylar in other places, the cannibalized IKEA Jansjo lights at the top, the 5 filament guide tubes, and the HAVEN automatic fire extinguisher. The filament guide tubes are sized for 3mm filament even though this machine runs 1.75mm filaments. This proved necessary to reduce friction over the long runs. There's no reason I can think of not to use this thick guide tubing in a non-Bowded system. The build plate is kinematically supported on a three-ball in three vee-groove support truss. The balls piston up and via thumb screws (two visible here):
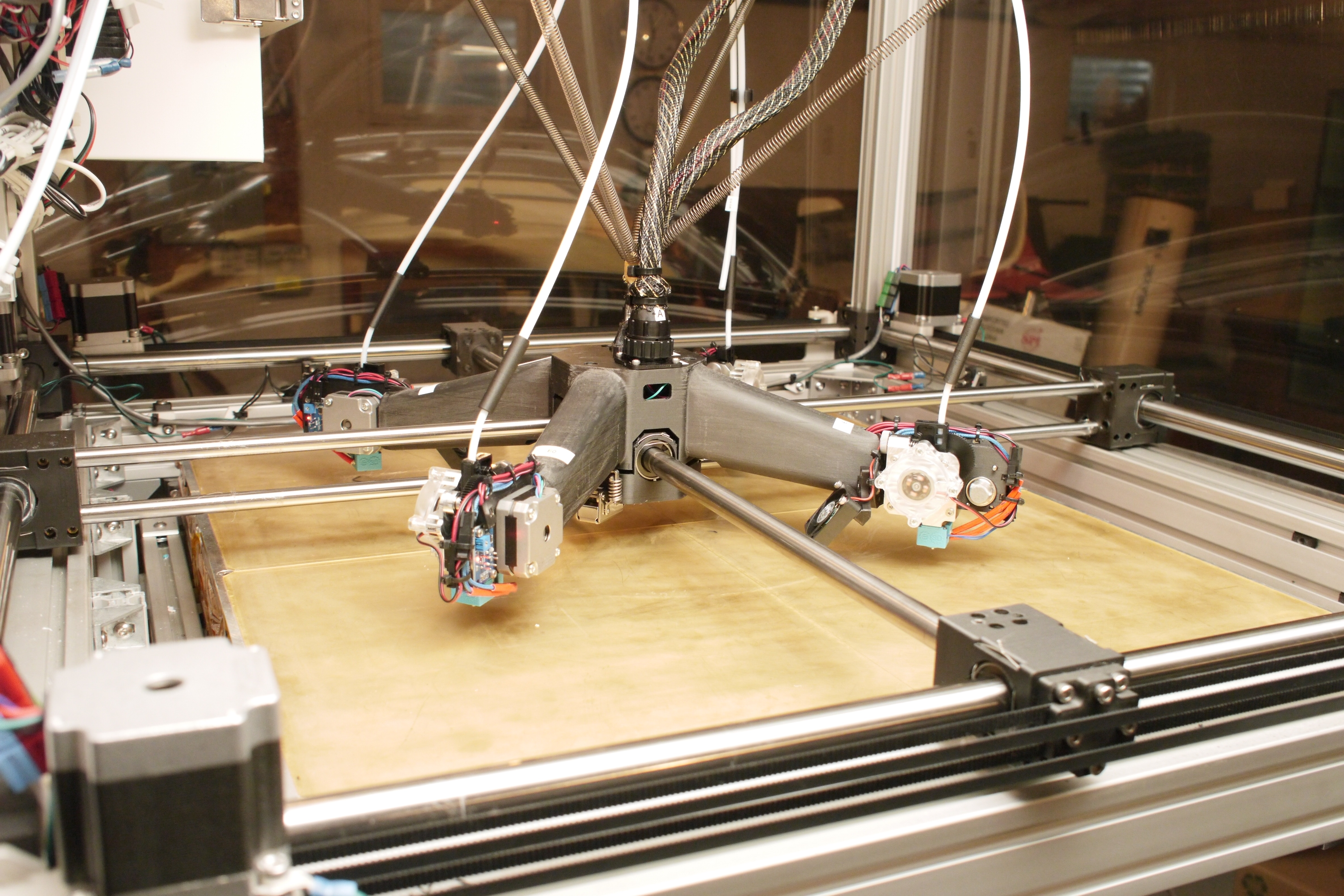
A view of the crossed-rail XY motion system. Two motors for X and two for Y. See rendering below for more info.
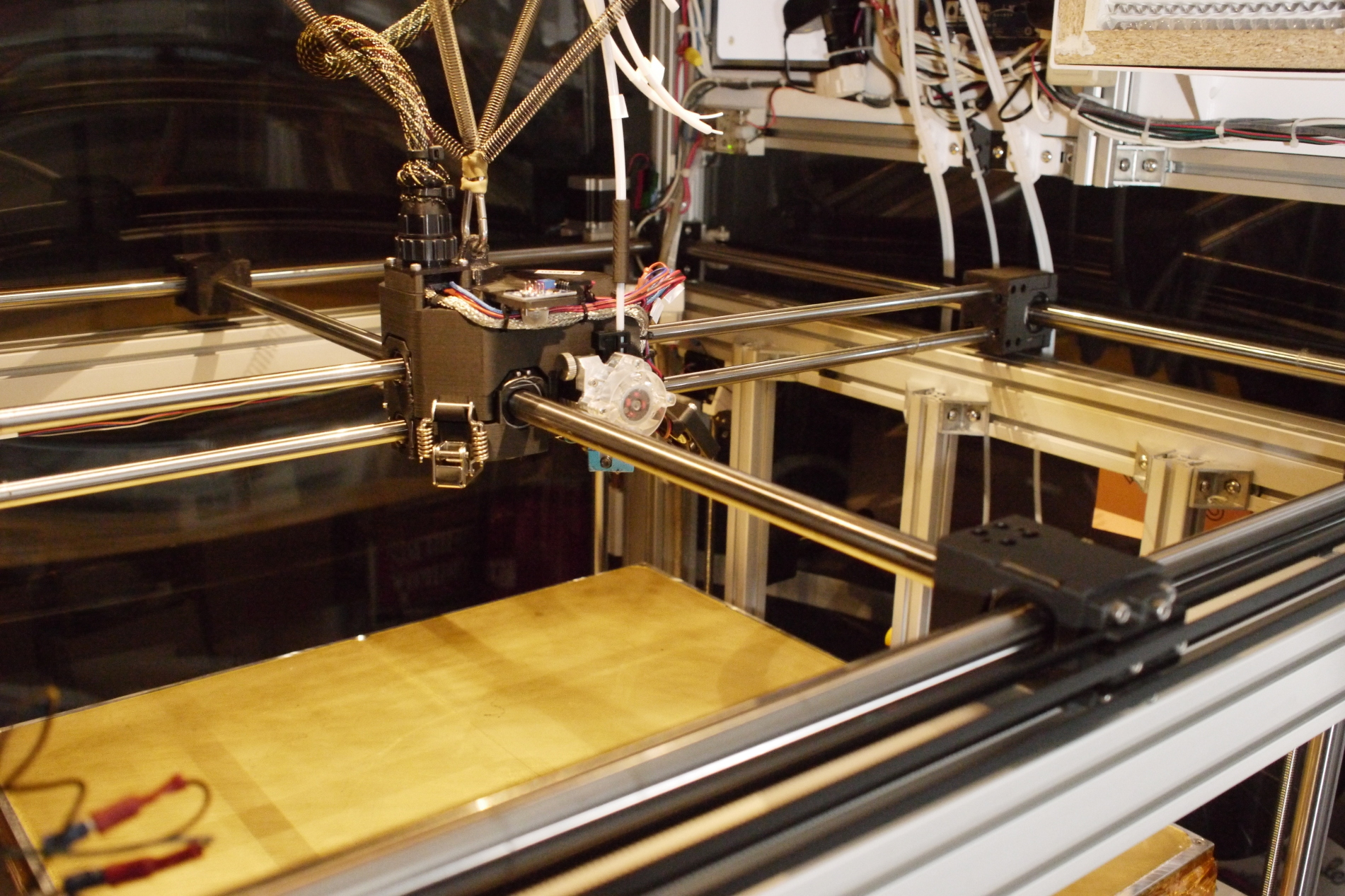
Another view:
A better view of the solid state relays and cable routing for the build plate.

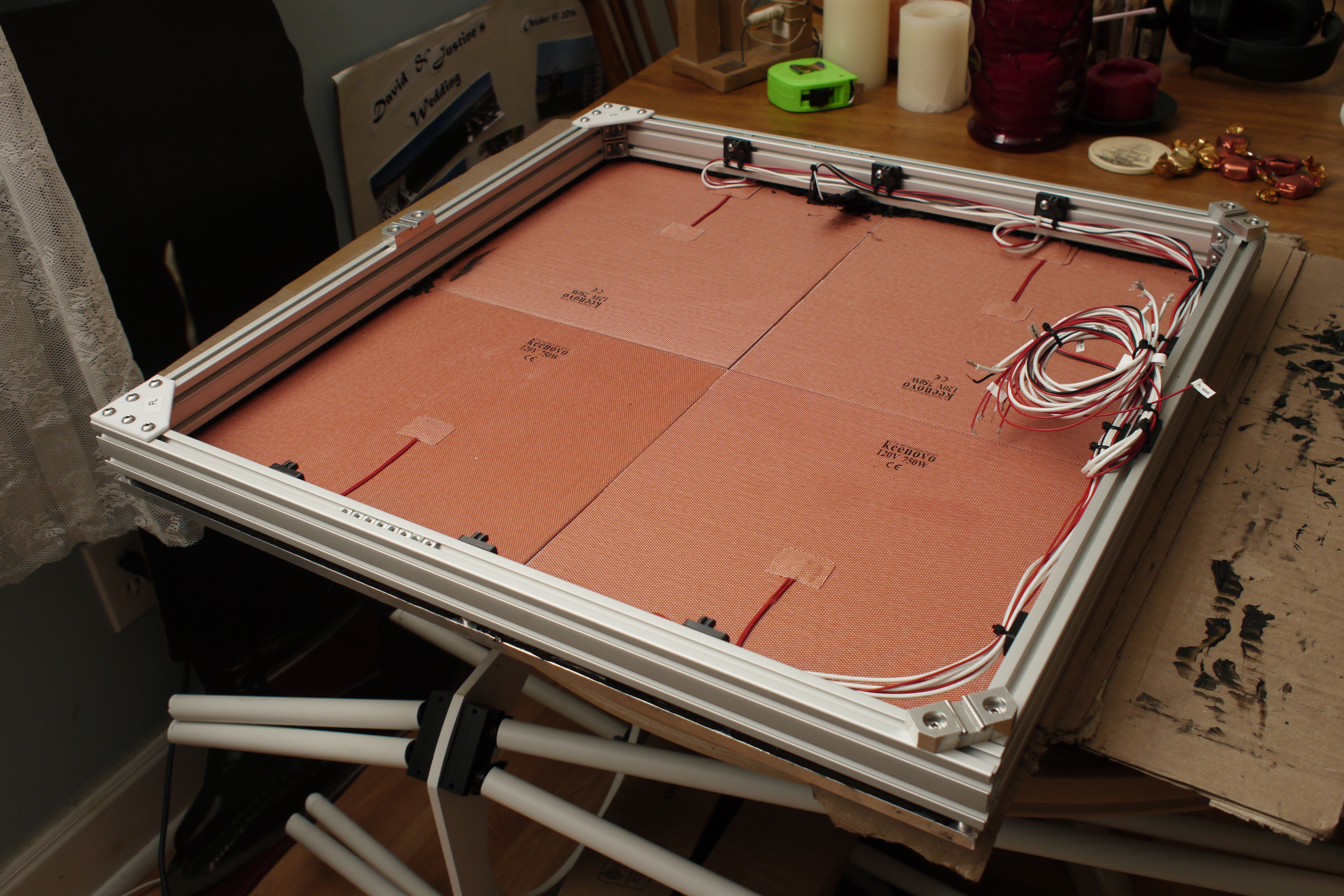
The underside of the build plate during construction. The space visible here was filled in with fiberglass insulation and retained with structural wire before covering with the gold mylar. Note the kinematic vee-blocks, each comprised by two parallell steel dowels:
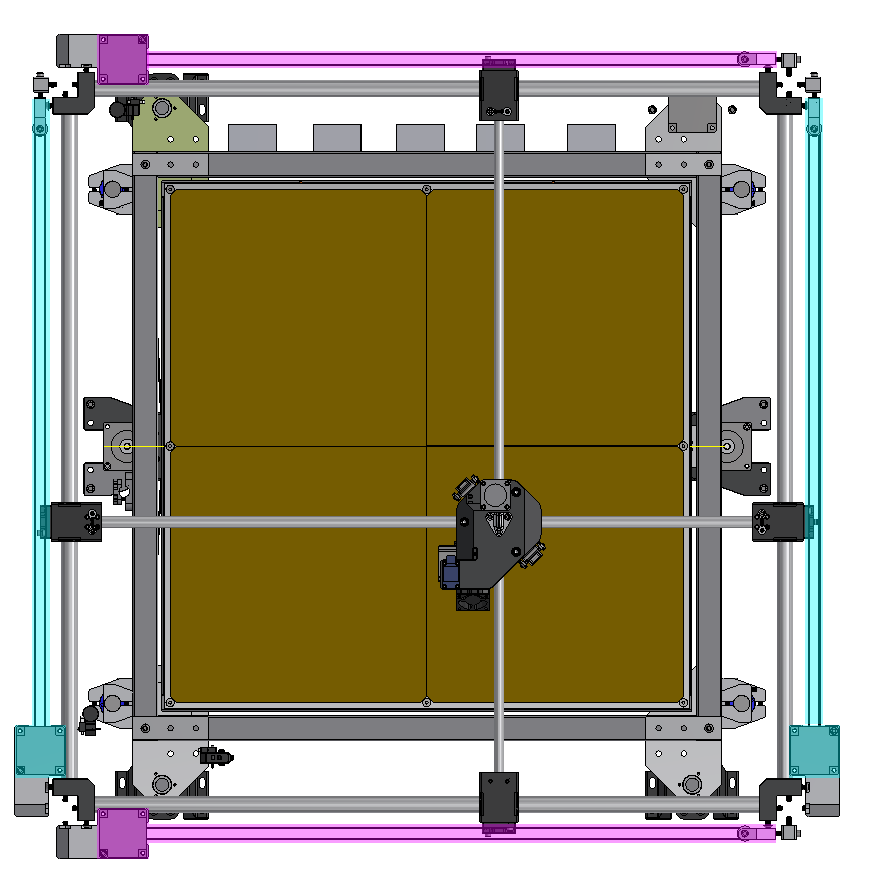
The X-Y drive system:
The main half of the control panel right after initial assembly:
One of the two toolhead cables (each cable services up to two extruders):

The quad-toolhead ready to go: